Becky Hill & John Long
Ergonomics & HCI Unit, University College London,
26 Bedford Way, London WC1H 0AP, England.
Tel: +44 (0)171 387 7050.
Fax: +44 (0)171 580 1100.
E-mail: b.hill@ucl.ac.uk.
ABSTRACT
The emergency management combined response system is a planning and control system, set up to manage disasters. This paper presents a preliminary model of the planning and control of the combined response system and its domain. The model is based on a framework for modelling planning and control for multiple task work and on data from a training scenario. The application of the framework has extended its scope to the new domain of emergency management combined response. In addition, the preliminary model is used to identify tasks and behaviours of the combined response system which highlight issues of co-ordination.
Keywords
Planning and control, multiple tasks, emergency management
INTRODUCTION
This paper presents an informal analytic assessment of a model of the emergency management combined response (EMCR) worksystem with respect to the data from a training scenario. The model was derived by applying a framework for modelling planning and control in multiple task work (PCMT) to the data from an emergency management training scenario. This framework has been applied to develop models of three office administration planning and control domains – Medical Reception (Hill, Smith, Long and Whitefield 1995) -Secretarial Office Administration (Smith, Hill, Long and Whitefield 1992) and Solicitors Legal Work. The intention here was to extend the scope of the PCMT framework by using it to model a domain other than office administration. The first section of the paper characterises the domain to be modelled, identifying issues with the current design of the EMCR worksystem. The following section outlines the PCMT framework. Next, the data collection, training scenario, and example data are described. The model of PCMT- EMCR is then presented. Using the model to identify overlap between worksystem behaviours is exemplified. Last, issues related to the use of this framework for modelling the domain of EMCR are identified, along with plans for future work.
EMCR WORKSYSTEM
The planning and control system, which is set up for emergency response to disaster, is that of the ‘combined’ response (EMCR). The EMCR worksystem has a command and control organisation with a three tier structure. Different agencies use this structure to organise their own planning behaviours, so that they co-ordinate effectively with one another. The three levels of command and control are operational, tactical and strategic. At each level the agencies have their own commander for co-ordinating the response. At the strategic level, these commanders make up a ‘senior co-ordinating group’. The operational response is carried out by each agency, concentrating on its specific roles (tasks) within its areas of responsibility. For example, the Fire Service fight fires. The tactical response determines the priority in allocating resources, for example additional fire engines. It also plans and co-ordinates the overall response, obtaining other resources as required. The strategic co-ordinating group formulates the overall policy within which the response to a major incident is made. This EMCR worksystem has been specified to ensure better co-ordination of the different agencies involved in the response. Co-ordination in this context is defined as the ‘harmonious integration of the expertise of all the agencies involved with the object of effectively and efficiently bringing the incident to a successful conclusion.'(Emergency planning college document 1995). The principal agencies involved are the Police, Fire Service and Ambulance Service. The primary objectives for all the emergency services are: ‘to save life, prevent escalation of the disaster, to relieve suffering, to facilitate investigation of the incident, safeguard the environment, protect property and restore normality’ (Home Office Publication 1994).
However, a succession of public enquiry documents analysing various disasters have identified co-ordination problems within EMCR. The Home Office Emergency Planning Research Group has also identified problems relating to co-ordination within EMCR (see acknowledgements).
Each emergency service has its own major incident plan. Each plan specifies a set of roles/tasks that need to be supported, when responding to a disaster, for example, evacuation, setting up a casualty clearing station etc. Some of the tasks, at the most generic level of description, are the same for the three emergency services, for example the Police and the Fire Service both support evacuation tasks. Most of the behaviours which support these tasks for the two services are different, but some are the same. Sometimes the behaviours overlap between the different services, when they are supporting different tasks. The Fire Service may be attempting to set up an inner cordon to contain a hazardous scene; the Ambulance Service may be
attempting to access the same scene to locate casualties. It is proposed here, that when behaviours overlap, co-ordination between the services may become a problem. (Behaviours do not necessarily have to be the same to overlap.)
In developing the present preliminary model of EMCR with respect to a training scenario, it is intended to identify such overlapping behaviours to support better the identification of the co-ordination problems raised by the system.
FRAMEWORK
A framework was developed for modelling the planning and control of multiple task work (PCMT) in office administration. The PCMT framework makes a fundamental distinction between an interactive worksystem, comprising one or more users and computers/devices, and its domain of application, constituting the work carried out by the worksystem. This distinction allows for an expression of the effectiveness (performance) with which the work is carried out, conceptualised as a function of two factors: the quality of the task (i.e. whether the desired goals have been achieved), and resource costs (i.e. the resources required by the worksystem to accomplish the work) (Dowell and Long 1989).
In the framework, a domain of application (or work domain e.g. the disaster) is described in terms of objects, which may be abstract or physical. Objects are defined by their attributes, which have values. The attribute values of an object may be related to the attribute values of one or more other objects. An object at any time is determined by the values of its attributes. The worksystem performs work by changing the value of domain objects (i.e. by transforming their attribute values) to their desired values, as specified by the work goal.
The framework defines a number of worksystem structures for the planning and control of multiple task work. These structures are expressed at both abstract and physical levels of description. First, the framework describes the worksystem’s abstract cognitive structures. These structures comprise four processes (planning, controlling, perceiving and executing), and two representational structures (plans and knowledge-of-tasks). The four processes support the behaviours of planning, control, perception and execution respectively. A complete description for this set of structures, and the associated rationale, is to be found elsewhere (Smith, Hill, Long and Whitefield, 1992).
At the first (abstract) level of description, Plans are specifications of required transformations of domain objects and/or of required behaviours (to achieve goals). They may be partial (in the sense that they may specify only some of the behaviours or transformations). They may also be general (in the sense that some behaviours or transformations may be specified only generally, and not at a level which can be directly executed). Planning behaviours thus specify the required transformations and/or behaviours to support domain object transformations.
Perception and execution behaviours are, respectively, those whereby the worksystem acquires information about the domain objects and those whereby it carries out work which changes the value of the attributes for those objects as desired. Information about domain objects from perception behaviours is expressed in the knowledge-of-tasks representation. Control behaviours entail deciding which behaviour to carry out next, both within and between tasks.
The second level of description of planning and control structures is physical, wherein the framework describes the distribution of the abstract cognitive structures across the physically separate user and devices of particular worksystems.
This framework was chosen to model the combined response worksystem because:
(i) the EMCR worksystem is a planning and control system;
(ii) the work involves multiple tasks; and
(iii) there is a need to identify the tasks and behaviours of the worksystem in relationship to the work, to better identify co-ordination problems within the EMCR worksystem.
DATA COLLECTION
Data were collected by means of a training scenario which took place at the Home Office Emergency Planning Training College. The trainees were members of the emergency services and local authority emergency planning officers. The exercise required the trainees to describe their response to the disaster scenario from initial response to restoration of normality. Data were collected by transcribing the descriptions given by the trainees, and through presentations given by the trainees about their response.
There are various phases in response to the disaster scenario, each of which can be clearly defined, and which involve different worksystem configurations and different worksystem behaviours. In this paper, only one worksystem configuration and its behaviours is modelled – that of the initial response phase to the scenario.
Scenario
‘At 9.30am on a weekday during school term time, a tanker train en-route from a refinery to an airport fuel depot is derailed whilst passing over a railway bridge. The railway bridge carries the railway over the main access road to a town from east to west. The main access road bisects the town in a north/ south direction. There are market stalls set up on the roadway on either side of the bridge. At the time of the accident, a tourist’ bus carrying 45 foreign tourists is passing beneath the railway bridge. One of the tank cars is ruptured during the derailment and aviation fuel flows down the sides of the embankment onto the roadway. Flammable vapours from the fuel have been ignited by an open gas burner from a catering caravan. The explosion has created
severe structural damage in a 30 metre radius and moderate structural damage in 100 metre radius. At least 50 people have been killed including some of the foreign tourists, many people have received burns, and many people are trapped. A number have also been contaminated with aviation fuel. The leaking fuel has run down the road and is entering the canal and watercourses at the bottom of the incline. There is evidence to believe that vandalism may be responsible for the derailment.’
DESCRIPTION OF THE INITIAL COMBINED RESPONSE DATA
A major incident was declared within 15 minutes of assessing the situation. Thus, all the emergency services initiated their major incident plans. Each service has a set of defined roles or tasks specified in their individual plans. For this scenario, examples of initial Police roles/tasks were:
setting up and manning an outer cordon around the site (a larger area than the scene).
preserving and managing the scene
logging all personnel entering the outer cordon
establishing routes and rendezvous points and marshalling areas for all the emergency services
Examples of the initial Fire Service roles/tasks were:
set up an inner cordon
control the fire
carry out immediate rescue
Stem the flow of the hazardous substance
Monitor the health and safety of all inside the inner cordon
Examples of the initial Ambulance Service roles/tasks were:
set up a casualty clearing point
set up a triage point
get medics to the scene
help with evacuation of bedridden people
For each of the tasks the personnel required were identified by, and are shown in, the model.
PCMT-EMCR MODEL
The model describes the EMCR worksystem and its domain for the initial response scenario data. The initial response in this scenario had no strategic level of command. Thus, although the strategic level physical worksystem users and devices are represented in the model, they are included for completeness. No further description is offered. Also, the operational physical users and devices change rapidly over time. The model represents only those entities present for initial response. The local authority response has not been modelled.
EMCR Domain
Based on the PCMT framework, the EMCR domain is expressed as those objects, whose transformation constitutes the work of the EMCR worksystem.
In the model, the domain is conceptualised as having a single disaster object comprising other abstract objects, such as lives, property, environment etc. The disaster object and its component sub-objects are abstract. The sub-objects of the domain are based on the identified primary objectives of EMCR (see earlier). The domain in addition contains physical objects.
The work carried out by the EMCR worksystem is thus the transformation of a ‘disaster object’s’ attribute values. Each task carried out by the EMCR worksystem transforms the attribute values of the disaster object. For example, one attribute is stability, which has values along a continuum (i.e. very unstable, slightly unstable, unstable, nearly stable, moderately stable, stable). The work of the EMCR worksystem is to transform this attribute to a desired level of stability. In order to transform this attribute, the attributes of the component sub-objects must be transformed. This attribute value changes by manipulating the values of the attributes of the other objects of the domain, for example, transforming the ‘lives object’ attribute survivor from not rescued to rescued. The transformation of the abstract object attributes result from the manipulation of the physical domain objects of the worksystem. Attributes may be affordant or dispositional. Affordant attributes are transformed by the worksystem; their transformation constitutes the work performed. Dispositional attributes are relevant to the work (they need to be perceived by the worksystem, but are not changed by the worksystem ). For example for the ‘lives object’ the attribute survivor has a value of mobility injured or mobility uninjured. This value needs to be perceived by the EMCR worksystem, so that the Ambulance Service knows there is a casualty to be transported. However, the worksystem does not change the injured state of the survivor. In Figure 1, all the starred attributes are dispositional.
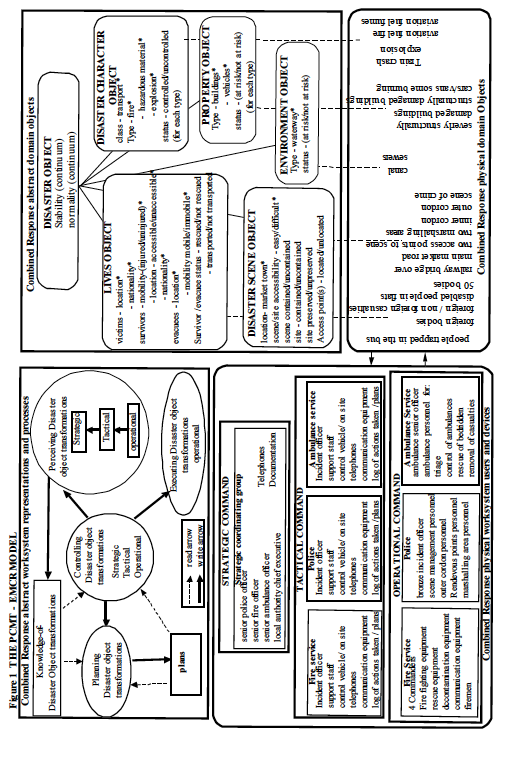
Figure 1 shows the physical domain objects (but not their attributes) in the model. Included are all the objects identified from the scenario data. The objects include those associated with the example which follows.
EMCR Worksystem
The model of the EMCR worksystem (see Figure 1) shows the cognitive structures of the PCMT framework. The cognitive structures in Figure 1 embody the planning and control behaviours described earlier. The framework comprises four process structures: planning; controlling; perceiving; and executing and two representation structures: plans and knowledge of tasks. For EMCR, these cognitive structures were identified as follows:
A perceiving process which acquires information about property, lives and other domain objects, such as their risk status. This information appears in the knowledge-of-tasks representation. A task in the EMCR will be different for the different agencies. A task for the Police could be setting up a casualty clearance point. A task for the Fire Service could be making sure all personnel are safe within the inner cordon.
An executing process which transforms domain object attribute values. For example, moving injured survivors
away from the scene transforms the ‘lives object’ attribute survivor from not rescued to rescued.
A controlling process which decides which of the other processes should be carried out next based on the plans and knowledge-of-tasks. For example the controlling process might direct the executing process to perform next the execution behaviours of evacuating people (based on the perceiving process that identified where people were, and the knowledge-of-tasks information that people in this situation are at risk), rather than directing the planning process to specify how to preserve the scene. (Thus, there is prioritisation of the tasks carried out by EMCR.)
A planning process, which constructs plans based on knowledge-of-tasks. For example using information from knowledge-of-tasks that the scene needs to be preserved for investigation, the planning process constructs a plan of the sequence of behaviours to carry out this task.
The Plans representation structure embodies the different types of plan used in the combined response.
A knowledge-of-tasks structure, which represents knowledge of relevant aspects of the work domain. For example, the type of hazardous substance.
The physical worksystem comprises the Police and their devices, the Fire Service and their devices, the Ambulance Service and their devices (plus other agencies and their devices which may be involved). The framework allows the construction of alternative models of the distribution of cognitive structures across the user and devices. Thus, it supports reasoning about allocation of function. In the case of the EMCR worksystem, planning and control are distributed across the different levels of the worksystem hierarchy. In the model, the distribution of the structures across the physical worksystem is not shown. However, these physical worksystem structures support its behaviours. In the example which follows, the worksystem behaviours are identified for a selection of data from the training scenario to illustrate this distribution across the worksystem.
RELATIONSHIP BETWEEN THE DOMAIN AND THE WORKSYSTEM
This section describes an example of two tasks being carried out by the combined response system, in terms of the planning, control, perception and execution behaviours and the transformations these behaviours perform in the domain. This description helps to identify potential conflicts within the combined response system behaviours which may cause co-ordination problems. It also highlights some issues related to using the PCMT framework for modelling EMCR, which will be discussed in the final section.
The Fire Service operational commander carries out perception behaviours that update his knowledge-of-tasks with the information that there are structurally damaged buildings, fires and leaking hazardous fuels. He then carries out control behaviours that direct him to consult the major incident plan. According to the plan, the Fire Service is responsible for setting up an inner safety cordon when there are hazards and dangers at the scene. It also maintains the safety of the emergency service personnel within this cordon. Based on this plan, the operational commander then carries out control behaviours that direct him to consult the operational plan for setting up of a cordon. The operational plan gives guidance for cordon set up and regulations.
The operational commander then carries out control behaviours that direct him to carry out planning, based on the operational plan and the knowledge-of-tasks. The planning specifies how the inner cordon should be set up and what the regulations are for entering it. The operational commander then carries out control behaviours that direct him to carry out an execution behaviour of setting up the cordon. This execution behaviour is carried out by the operational personnel setting up the cordon and maintaining specified safety regulations. It is the manipulation of the physical objects that transform the abstract disaster scene objects attribute scene from uncontained to contained.
The operational commander then carries out control behaviours that direct him to inform the tactical incident officer of the inner cordon set up. The tactical incident officer thus carries out perception behaviours which update his knowledge-of-tasks about the inner cordon set up. The tactical incident officer then carries out control behaviours that direct him to consult his plan to assess the resources required for the set up. He then carries out planning behaviours to specify the resources required for this task.
At the same time, the operational Ambulance senior officer is carrying out perception behaviours that update his knowledge-of-tasks with the information that there are a number of casualties at the scene. He then carries out control behaviours that direct him to consult his major incident plan. According to the plan, casualties must be located and then either treated at the scene and/or transported to hospital. He then carries out control behaviours that direct him to carry out planning behaviours to specify in the operational plan what personnel are required and how to access the casualties. This plan then directs him to carry out control behaviours to direct the execution behaviours of accessing, treating and transporting casualties. These execution behaviours are carried out by the Ambulance operational personnel. It is the manipulation of the physical objects which transform the abstract lives object attribute survivor from not transported to transported.
However, the Ambulance operational senior officer has not carried out perception behaviours that update his knowledge of tasks that the scene is now contained. Therefore, when the Ambulance personnel attempt to carry out their execution behaviours, they do not fulfill the proper safety requirements which would allow them to enter the inner cordon. Therefore, the execution behaviours of transporting casualties cannot be carried out. The primary objective of EMCR is to save life. Here, there is an overlap of behaviours which is
hindering this objective. Also, if the Ambulance Service is not allowed to carry out its execution behaviour, in trying to increase the saving of life, the fire service must carry out rescue execution behaviours to move the casualties to the edge of the inner cordon. These rescue execution behaviours will decrease the resources available for carrying out the execution behaviours of controlling the hazard, thus decreasing the effectiveness of the response to the secondary objective of preventing escalation of disaster
To attempt to rectify this situation, the Ambulance senior officer informs the Ambulance incident officer of the inner cordon regulations. Thus, the Ambulance incident officer carries out perception behaviours that update his knowledge-of-tasks about the inner cordon regulations. He then carries out control behaviours that direct him to carry out planning behaviours to specify in the plan the required equipment for all resources directed to the scene. Until these regularised resources arrive, the Ambulance incident officer needs to communicate with the Fire Service incident officer to try and negotiate access for the operational personnel. The Fire Service incident officer should have informed the Ambulance incident officer of the regulations, to obviate the problem of co-ordination.
CONCLUSIONS
This paper has described the application of the PCMT framework to modelling the domain of Emergency management combined response (EMCR). A preliminary model has been developed based on data from a training scenario. This final section will discuss issues related to using the PCMT framework for modelling this domain, and the use of the model for identifying overlapping behaviours that highlight co-ordination issues within EMCR.
The PCMT framework is for use in planning and control for multiple task domains. EMCR is such a domain, but there are differences between this domain and the other domains already modelled. First, EMCR has a changing worksystem. The PCMT representation does not currently represent a changing worksystem. Thus, the preliminary model only represents one phase of response. Second, EMCR is multiple task, but unlike the previous domains studied, there are not multiple objects at the highest level i.e. multiple disaster objects, rather there are multiple sub-objects, such as multiple lives objects. Third, EMCR is made up of multiple agents within a complex three tier command structure. The PCMT framework has so far only modelled domains with a single level of operation. Thus, interactions between the different horizontal layers and different vertical layers of the system are difficult to describe in terms of the present framework. The difficulty can be appreciated in the example, where the different commanders liase, at the same horizontal level, and information flows between vertical levels.
However, the model provides a description of the system and its domain that can be used to identify overlapping behaviours, albeit for a simple example and in a limited context. The allocation of the abstract structures across the physical worksystem can be inferred from the description of the physical behaviours, which can then be used to identify possible reconfigurations of the worksystem to support more effective co-ordination.
Future work will develop more complete models of EMCR in response to a disaster scenario and in so doing extend the PCMT framework to accommodate the issues described earlier.
ACKNOWLEDGEMENTS
This work is part funded by the Home Office Emergency Planning Research group under the EPSRC CASE scheme.
Thanks are due to the Home Office Emergency Planning college for their infinite co-operation with the data collection
REFERENCES
Dowell, J. and Long, J. (1989) Towards a conception for an engineering discipline of human factors. Ergonomics, 32, 1513-1536.
Hill, B., Long, J.B., Smith, W. and Whitefield, A.D. (1995) A model of medical reception – the planning and control of multiple task work, Applied Cognitive Psychology, 9, 81-114.
Smith, M.W., Hill, B., Long, J.B. and Whitefield, A.D. (1992) Modelling the Relationship Between Planning, Control, Perception and Execution Behaviours in Interactive Worksystems. In D.Diaper, M.Harrison and A.Monk (Eds) People and Computers VII; Proceedings of HCI ’92. Cambridge University Press.
Dealing with Disaster 2nd Edition (1994). Home Office Publication HMSO London.
Emergency planning college document (1995) Management levels in response to a major incident – The Principles of Command and Control
Figure 1 The PCMT-EMCRS Model